建筑物成图技术已经发展多年,技术手段有采用传统全站仪、RTK测量仪等,也有采用当前较为先进的航空测量技术方案。
航空测量技术方案分为摄影测量和激光测量两种方式。摄影测量采用单镜头或多镜头方案拍摄地物形成二维或三维数据。正摄影测量由于无法提供建筑物立面数据应用受限;采用三维倾斜摄影在城市等建筑物特征丰富以及树木遮挡的应用场景能够获取较优的数据质量。针对农村的地籍测绘应用场景在内业数据处理以及树木遮挡受到较大应用限制。
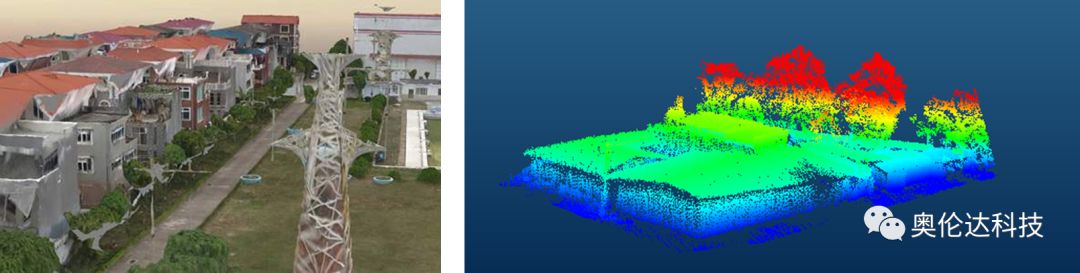
三维激光雷达测量技术是当前最为先进的技术方案,激光雷达由于其穿透性可以获取到丰富的三维数据信息。配合后期处理软件可以有效解决外业数据采集、内业数据处理效率以及数据质量的问题。
Alundar Platform点云处理软件是成都奥伦达科技有限公司开发的一款针对多平台的三维点云数据处理平台。支持亿级点云数据渲染与编辑。软件提供点云自动匹配、航带分割、航带匹配、安置检校、航带平差等新颖的点云数据处理方法,能够有效提高点云数据质量。
基于Alundar Platform点云处理软件的成图已经开始应用于复杂地形下的地籍成图。
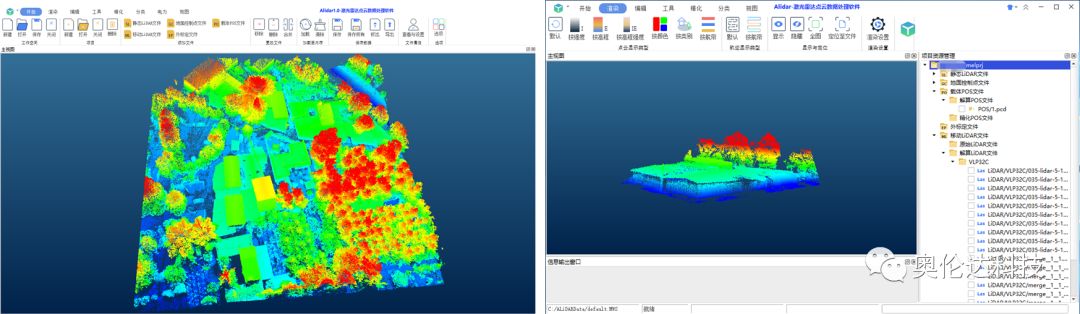
一、数据解析与预处理
软件支持CBI系列激光雷达以及标准点云格式第三方数据。
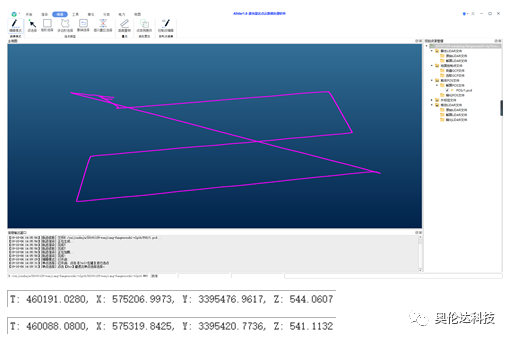
根据输出窗口提示选择点,选择两个点查看起始和结束有效时间。
通过选择开始和结束时间,选择解析有效数据。
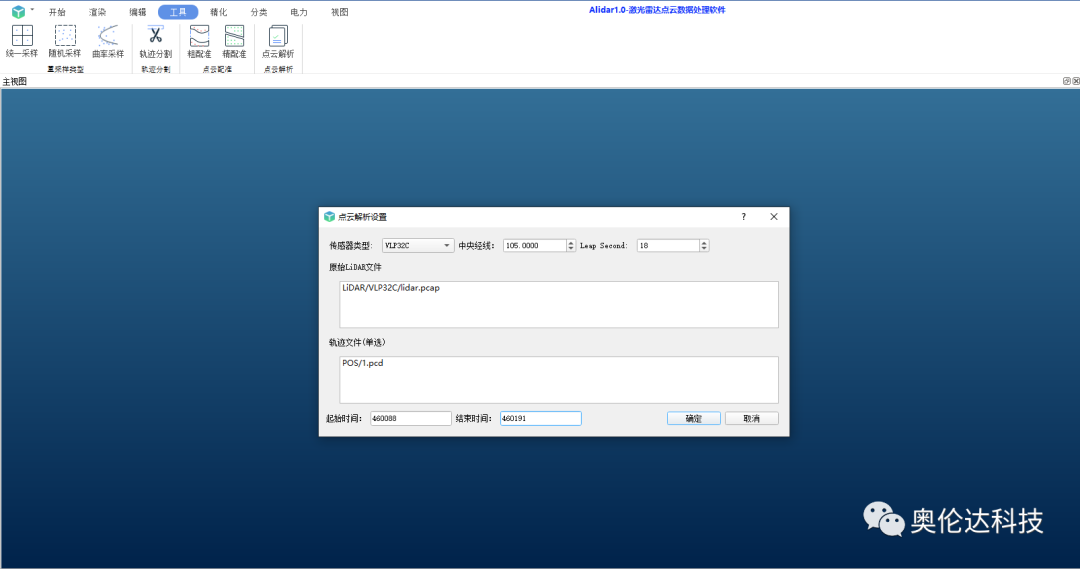
通过选择仪器类型,设置中央经线等数据,解析点云数据。
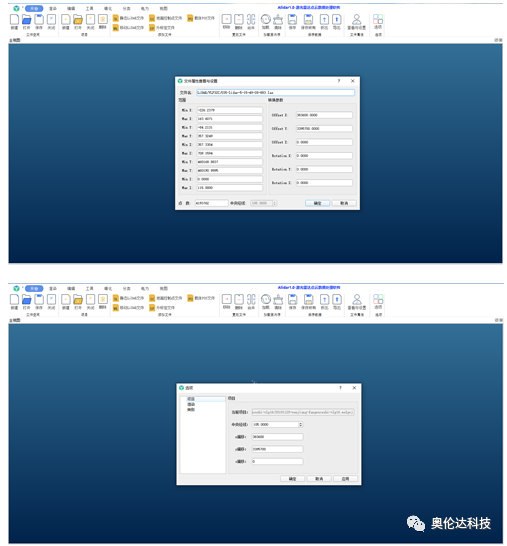
设置项目平移量
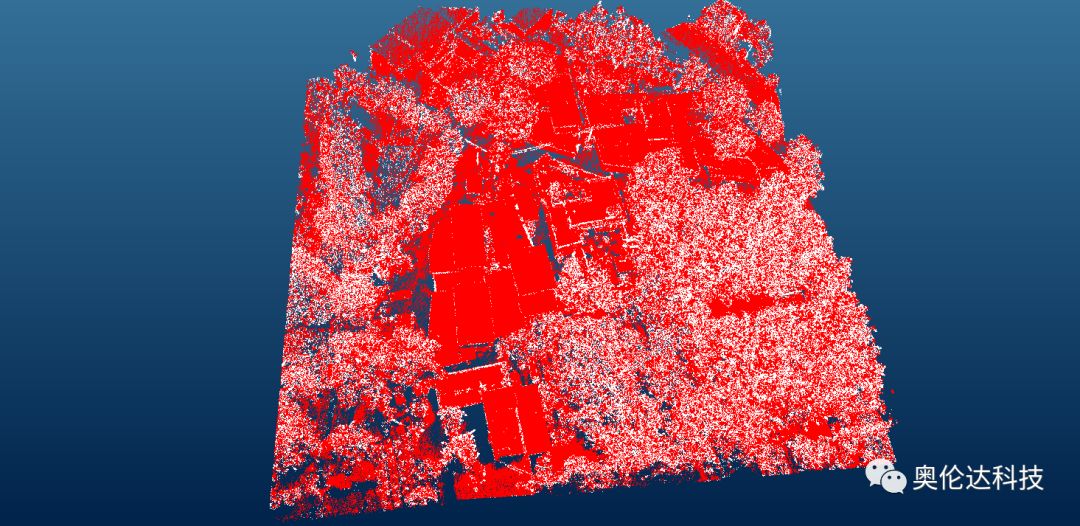
使用离群点检测将离群点(噪点)归为一类
通过离群点剔除,去掉与测量无关的噪点。

根据仪器类型和实际需求设置有效距离。
针对CBI-200型产品,选择有效精度范围内数据1-150米距离,将不符合要求的点云数据点自动去除掉。

数据导出
二、航带平差
移动测量中,由于GNSS以及INS精度水平,会存在同一物体在多航带测量中,被多次采集,存在精度误差,采用航带平差功能减小多航带产生的误差。
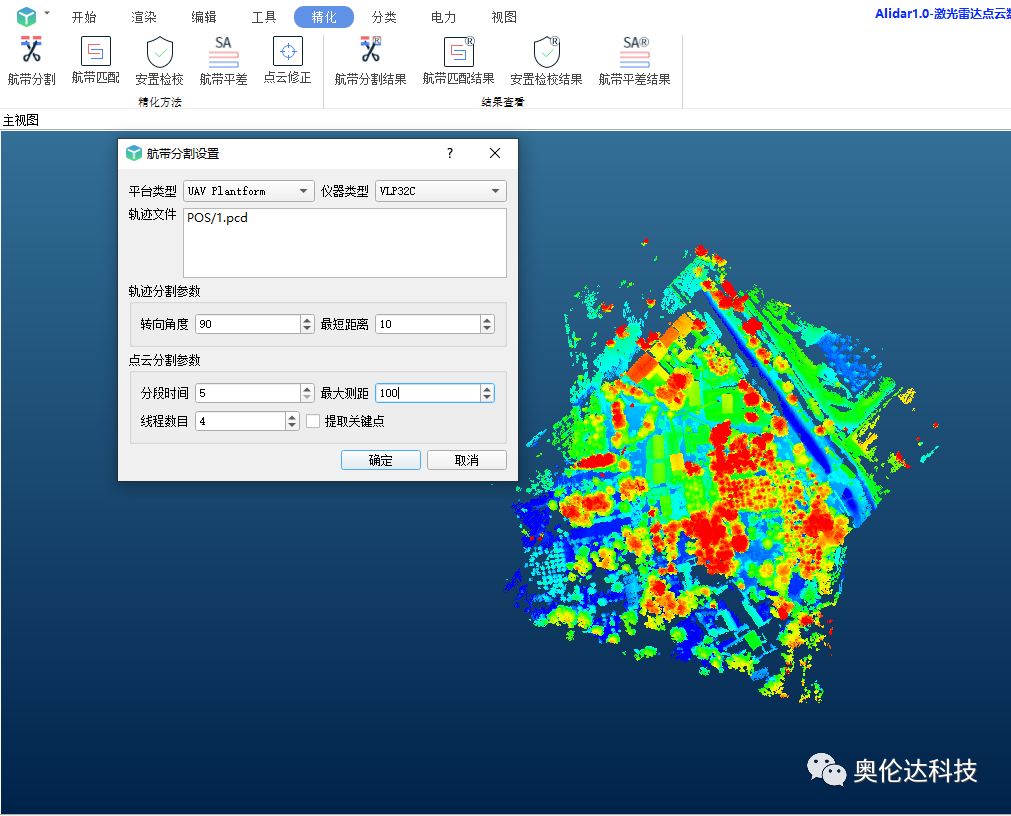
航带分割
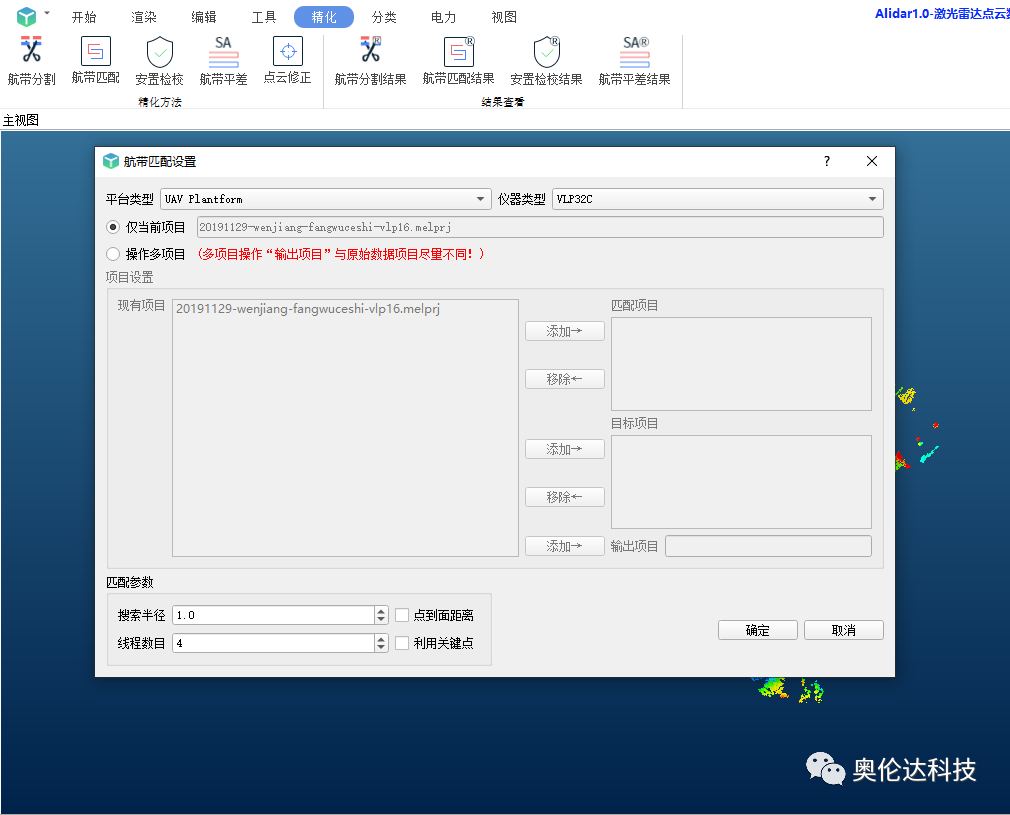
航带匹配
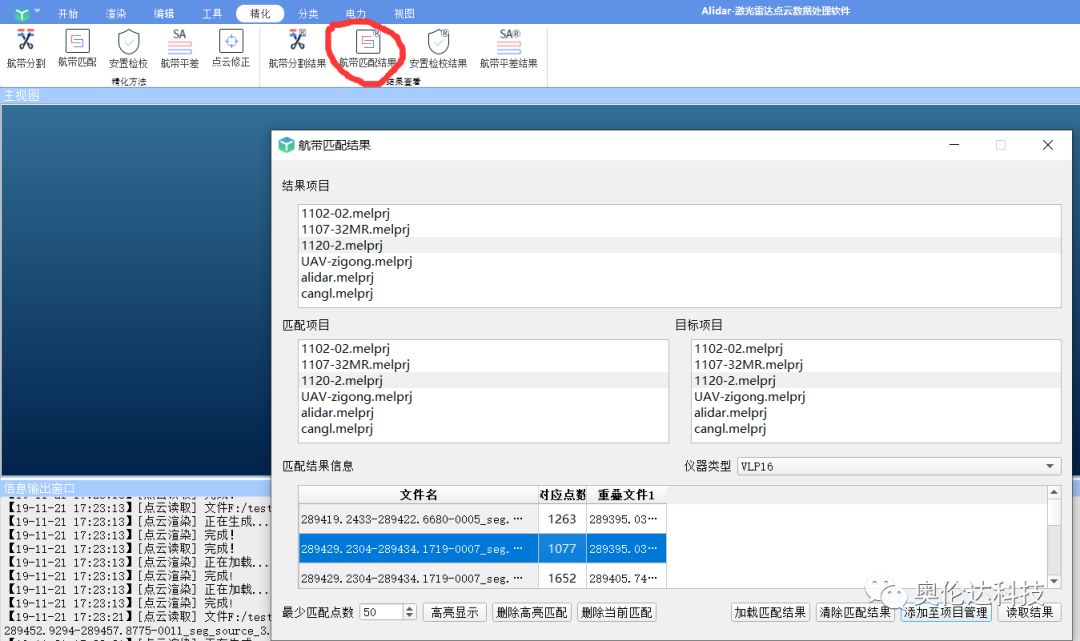
航带匹配结果
通过航带匹配结果,可以将匹配不好的去掉,提高匹配精度。
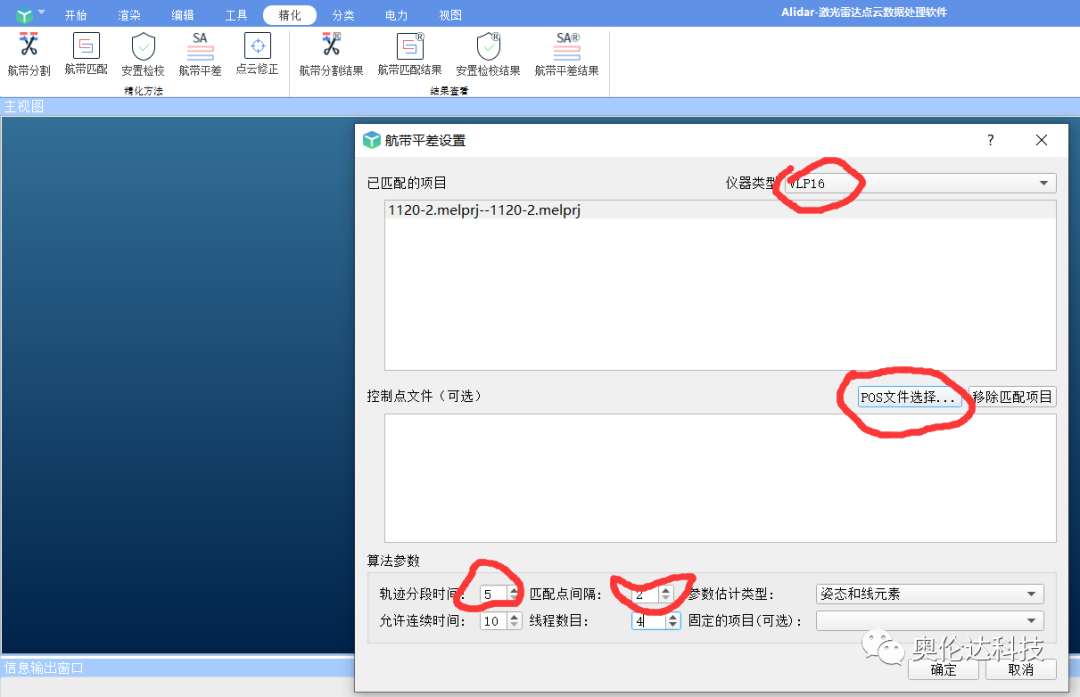
航带平差
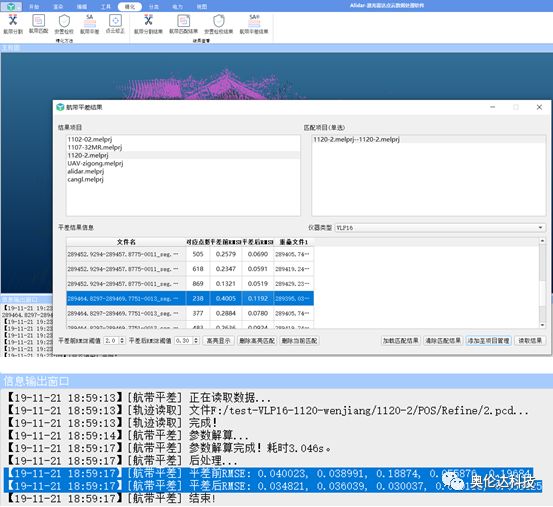
航带平差结果
通过数据对比以及实际测量,通过航带平差可以有效改善多航带测量误差,提高测量相对精度以及绝对精度。
具体航带平差原理以及应用将在以后进行详解。
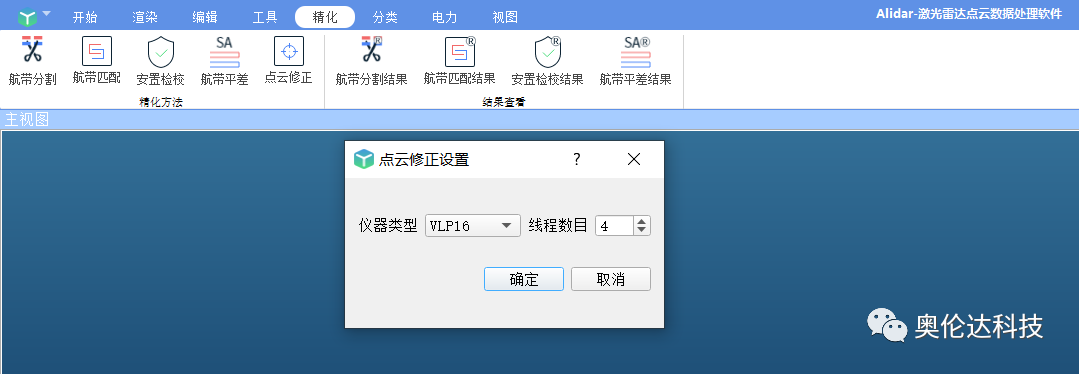
点云修正
三、测区选择
选择实际测区数据,ALiDAR点云处理软件提供了矩形、多边形等选择工具。根据实际需要进行选择。剔除掉无用数据,提高处理速度。

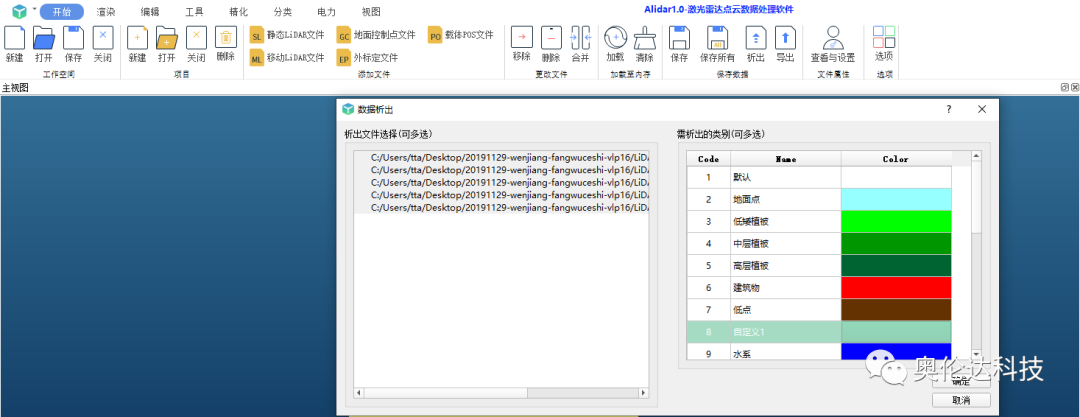
通过析出工具,将选择的点云,建立一个专门的类别进行存放,以便后续处理。具体文件存放于用户文件中。
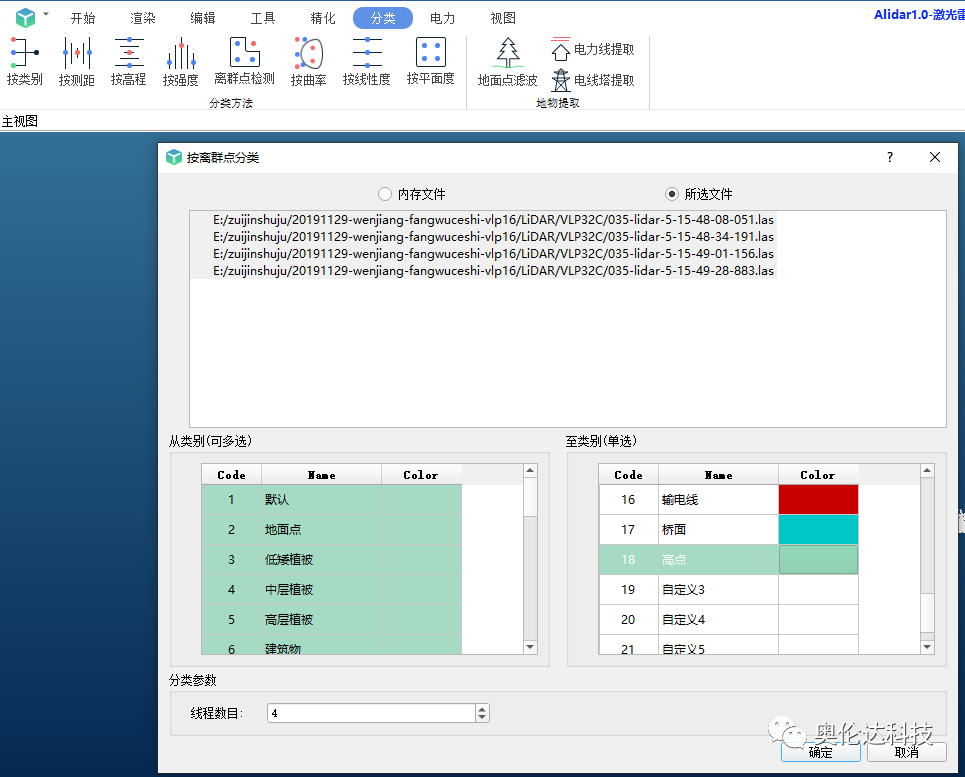
四、数据分类
通过地面点滤波,平面度检测、曲率检测等数据分类工具,将地面、建筑物、植被等类别进行自动化分类。
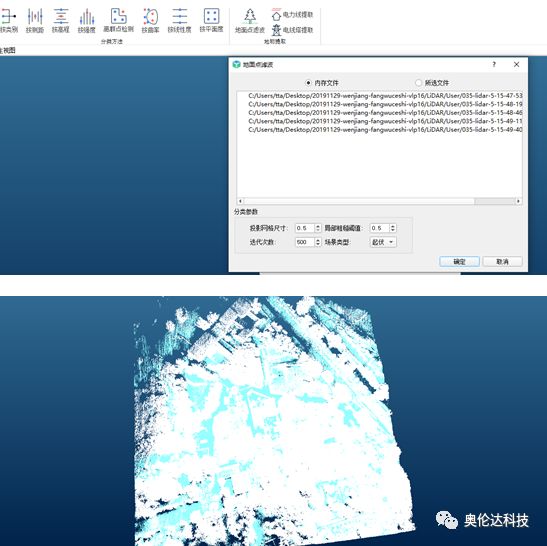
地面点滤波及结果
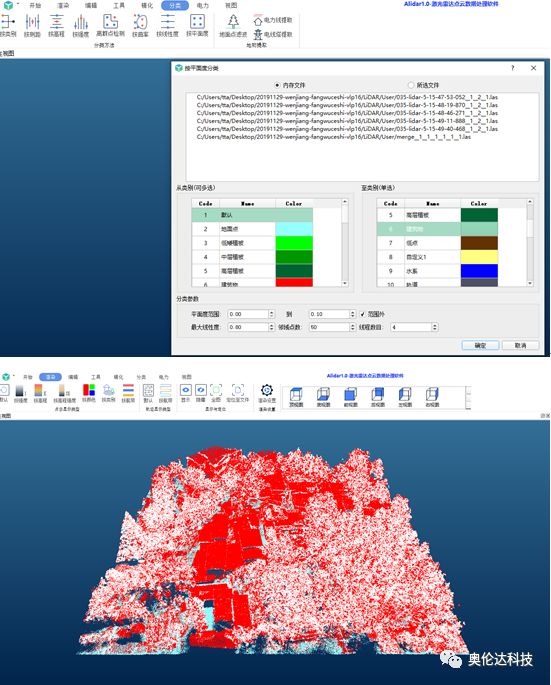
平面度检测及结果
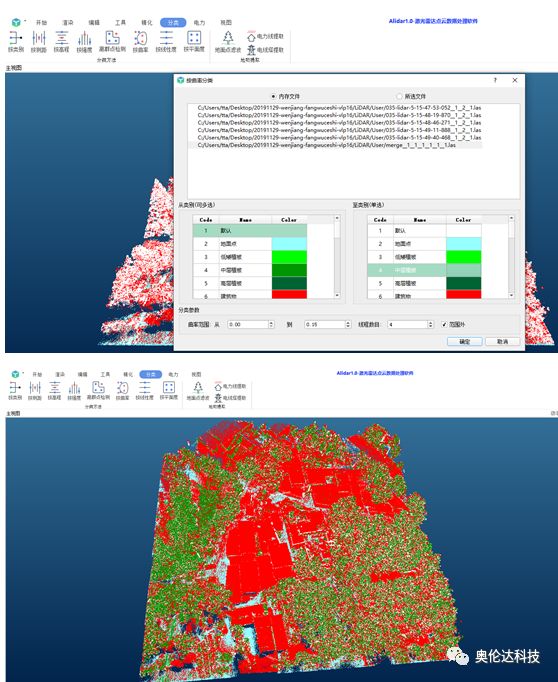
曲率检测及结果
析出建筑物及植被
建筑物及植被精细化分类后续将详细介绍。
建筑物群及分割后建筑数据
五、建筑物CASS成图
ALiDAR点云处理软件,提供了CASS等成图工具中间插件,通过点云选择建筑物边界点,将数据生成相应成图工具识别格式,进行图形绘制。

打开“编辑模式”,点击“点选择”,选择边界点。
注意:
通过软件渲染设置功能可以对点云大小以及颜色进行编辑。方便数据选择
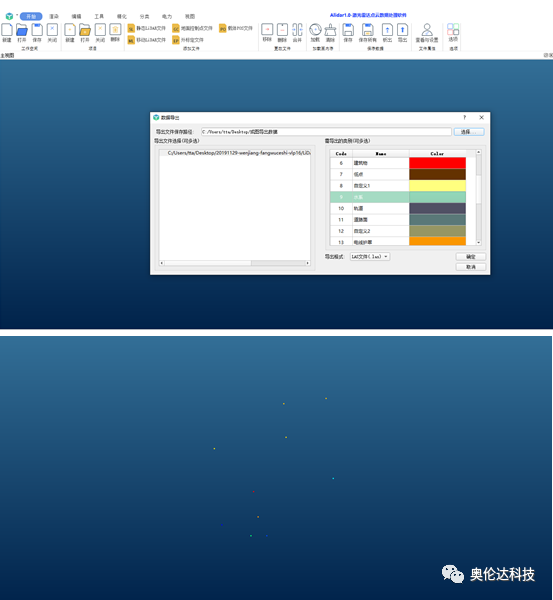
建筑物边界点导出
数据点导出使用ALiDAR提供的插件,将数据导出至CASS可以识别的格式。

CASS成图结果
六、成图示例

通过CASS绘制了测区房屋地籍图。
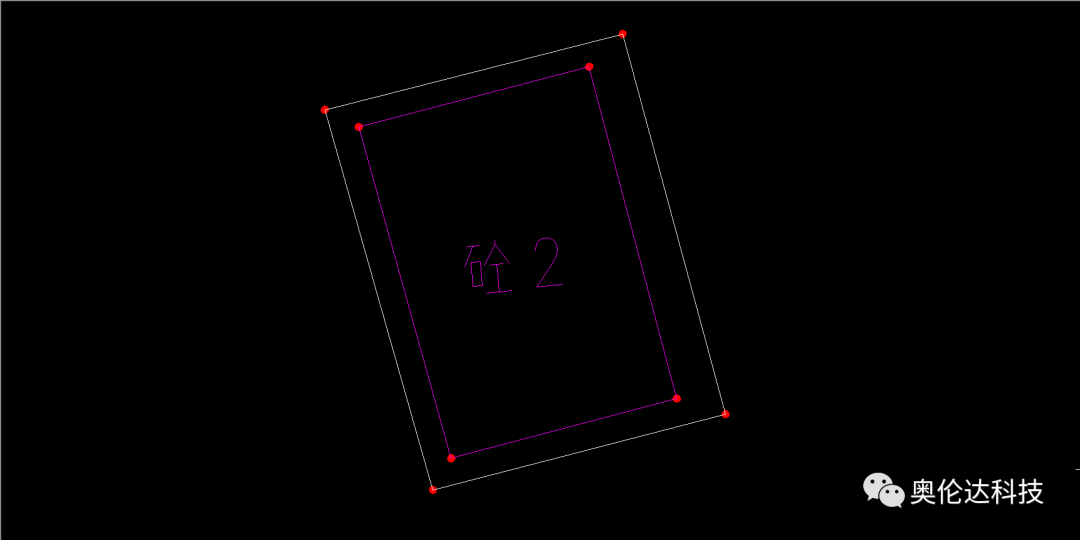
激光雷达能够获取建筑物外立面的高精度地图,通过上图可见,某建筑立面图以及檐廊图。
—— E N D ——